|

by Hib Halverson
Page 4
|
The Deep-Geek of MR: the "Sky Hook" Algorithm
We need a way to control the magnetism produced by each shock piston so MSRC can
apply its variable damping in a useful manner. Since I’ve described the needs of
the system in a sentence, don’t get the idea that developing MR’s controls was
easy. It took scores of people, hundreds of millions of dollars and a decade of
research and development to perfect Magnetic Selective Ride Control and the
lion’s share of the work went into the last word in the name: "control."
|

|
|
This is a
position sensor at the front of an 03 MR car. There are four of these on
the car, one at each corner. They send data to the MR controller...
|
|
 |
|
....located at the back of the car. Images: author |
|
MR’s position sensors measure each wheel’s movement. With that data, the
controller determines three types of body motion: pitch, roll and heave.
"Pitch", (front end moves up or down) and "roll", (the car leans), are terms
most of us have heard before, but "heave" might be a new one. When the car
heaves, both ends move the same way. If you drive over a rise, the body heaves
up, then down.
The sensors send that information to the heart of MagneRide, its
controller, located in the driver-side storage well at the rear of a C5.
It’s a powerful, dual-processor device capable of making 1000 adjustments
per second in each of the car’s four shocks. At highway speeds that’s a
damping change about every inch the car moves.
MagneRide, also, uses brake, throttle, steering angle, lateral acceleration
and vehicle speed data. MR even senses air temperature about which, Darin
Dellinger told the Registry site, "Much like all the other sensors that
contribute to the intelligence of the MR system, temperature gives us the
ability to adjust damping for low and high temperature operation. It's no secret
that a car’s character, in general, may change with temperature extremes
(because of rubber parts, etc.). We can use temperature information to make
the car's ride performance more consistent over its entire operating range."
The MR controller processes sensor data with various software
"algorithms" An algorithm is a set of steps for solving a problem. To be an
algorithm, a set of steps must be unambiguous and have a clear stopping
point. The different algorithms MR uses fill a thick book |
|
Back in ancient times–the end of the 1980s, GM had a major program to
develop active ride or "Active Suspension" as it was to be called. GM got very
close to releasing active ride as a ZR-1 option. A dozen or so development
vehicles were in validation, the Owner’s Manual had been rewritten to include
Active Suspension but, just before production began in early 1990, GM pulled the
plug.
By definition, an active ride system applies kinetic energy to the
suspension to counteract ride movements whereas passive ride systems, which even
MagneRide is, only provide damping–sophisticated damping perhaps (marketing guys
love to call it "semi-active" suspension) but nevertheless, MR is still
passive damping. |
|
 |
|
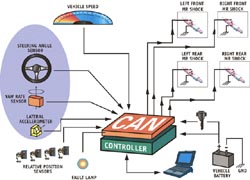
The basic components of Magnetic Selective Ride Control. Image: Delphi
Corporation. |
|
In the mid-’90s, I tested the remaining drivable Active ZR-1
at Milford. It was pretty amazing to drive. Bumps, dips and so forth were almost
nonexistent. Unfortunately, problems such as: ride harshness, weight,
service-complexity, high cost, engine power loss due to a big hydraulic pump and
service hazards related to the flammable, high-pressure hydraulics used by the
system had GM killing the program. For those planning a trip to the National
Corvette Museum, there is an interesting Active Suspension exhibit there.
The passing of active wasn’t a total loss because it provided
significant ride control software which was refined then used in RTD for MY96
and CVRTD for MY97. Active knowledge and additional experience gained with RTD
was, then, rolled into Magnetic Selective Ride Control.
When we talked about MR shock tuning with Mike Neal, we heard
a lot about "sky hook" which is one of the system’s more important algorithms.
Sky hook is the strategy focused on isolation and body control. It gets its name
from the idea that, if the car could be hooked to the sky, it would ride nice
regardless of how nasty the road gets but "sky hook" is not a literal
term. As good as MR is, it cannot isolate the car completely .
We interviewed Darin Dellinger and Mike Neal extensively for
this article and the most interesting dialog between them and the author
concerned algorithms.
"Included in the enormous amount of intellectual property
we’ve generated with our ride control system work,"
Darin Dellinger said,
"we have one patented algorithm which uses four wheel position inputs to
determine the body’s heave, roll and pitch."
"This is the sky hook algorithm,"
Mike Neal added.
"It’s one of MR’s main algorithms. Based on that, MR
commands some force level at each shock, separate at each corner and specific to
compression or rebound damping. This is done in an attempt to make the car not
heave, pitch, nor roll.
"Sky hook is a body control algorithm. We have other
algorithms for wheel control, which will give us different damping forces.
Separate from those fundamental algorithms, we have a whole bunch of others. For
instance, if you’re getting to the end of the travel, we have algorithms which
recognize that then do something to reduce impact on the bump stop. We have
algorithms that compensate for temperature. We have algorithms which condition
the signal to smooth transient spikes and things like that."
|

|
|
Delphi’s Darin Dellinger (left) and GM’s Mike Neal, shown here during a
discussion between them and media members off-camera about algorithms, are two
of the movers and shakers in GM’s effort to put MagneRide on Corvette. They are
backed up by scores of other design and development engineers at Lord, Delphi
and GM. Image: author |
|
DD: "it’s one thing to know the heave, roll and pitch of
the body and wheel motion but it’s quite another to figure out what’s most
important to damp at what time. Very generally, we separate our software into
four different areas: body control, wheel control, stability enhancement and end
of travel conditions."
MN: Over the years, these algorithms evolved and we added
new ones. Some were fundamental algorithms. Others were to address shortcomings
of the previous system (CVRTD) because it wasn’t quite as fast, quite as
strong or broad in bandwidth"
DD: "For example, during early CVRTD development, we invented an algorithm
which solved a control system instability that would cause the car to pitch. It
was a huge pitch...you could not miss this pitch. We had to come up with a
strategy to detect the road conditions which caused that pitch then to correct
the control system instability.
|
|
DD: "Yeah, ‘L..A. freeway hop’."
MN: "We came up with an algorithm specific to your neck of the woods."
DD: "It was crazy how noticeable this pitch instability
was. It would make the car go to end-of-travel during pitch oscillations."
MN: "It would almost make the car feel like you were
putting energy in–like an active car that wasn’t doing the right stuff. This
problem was so challenging, we duplicated that kind of road surface at our
(Mesa, AZ) Desert Proving Ground.
"A good thing about MR is, because it’s so fast and so much
more powerful in it’s damping force than our previous systems, we’ve been able
to eliminate a lot of conditioning algorithms in our calibration of the
Corvette."
|
|

|
|
Every writer’s nightmare. It was at this point in the interview that
Neal and Dellinger blamed having to develop the LA Freeway Hop algorithm for the
old RTD on the author, being that he lives in the vast suburban wasteland that
is Southern California. Image: author. |
|
Once MSRC’s sensors have gathered data and its controller has processed it with
the proper algorithms, four electrical drivers vary current flow to the
electromagnets in the shocks which control the magnetorheological effect to
provide the correct damping. This could be damping to improve ride, to improve
handling or it could be to limit front end lift during acceleration or dive
during braking. The MR controller networks with the Active Handing/ABS/Traction
Control computer and, if AH intervenes, MR might change damping to further AH’s
contribution to the car’s handling.
"Delphi refers to this interaction (between systems
such as MR and AH) as ‘UCC’, or ‘Unified Chassis Control.’" Darin
Dellinger stated. "In the past, we (GM and Delphi) have generally
called this stuff ‘Vehicle Stability Enhancement’. Suspension and brake control
systems are only one subset of an integrated system that could potentially
include suspension, brake, and steering systems."
|
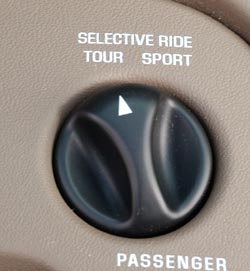
Image: author.
|
One change for 2003 is the selector switch, a fixture of Corvette
ride-adaptive systems since 1989, now has only has two positions. In the
"tour" position, the MR controller emphasizes the sky hook algorithm when
setting shocks and when set in "sport", it emphasizes wheel control.
|
|
Sponsored by:
 |
|